Sigo experimentando con la placa UNIHIKER de DFRobot y es increíblemente rápido hacer que las cosas funcionen en ella. Hoy traigo cómo configurar en 2 minutos la visualización en tiempo real de un sensor de temperatura, usando un módulo BMP-280 y absolutamente nada de programación.
Prerrequisitos
Aquí está el truco, y es que esperaba que tuvieras un par de cosas configuradas antes de activar el cronómetro:
- Descarga e instala Mind+, el IDE para UNIHIKER de DFRobot.
En Linux se trata de fichero .deb que se toma su tiempo para instalar:
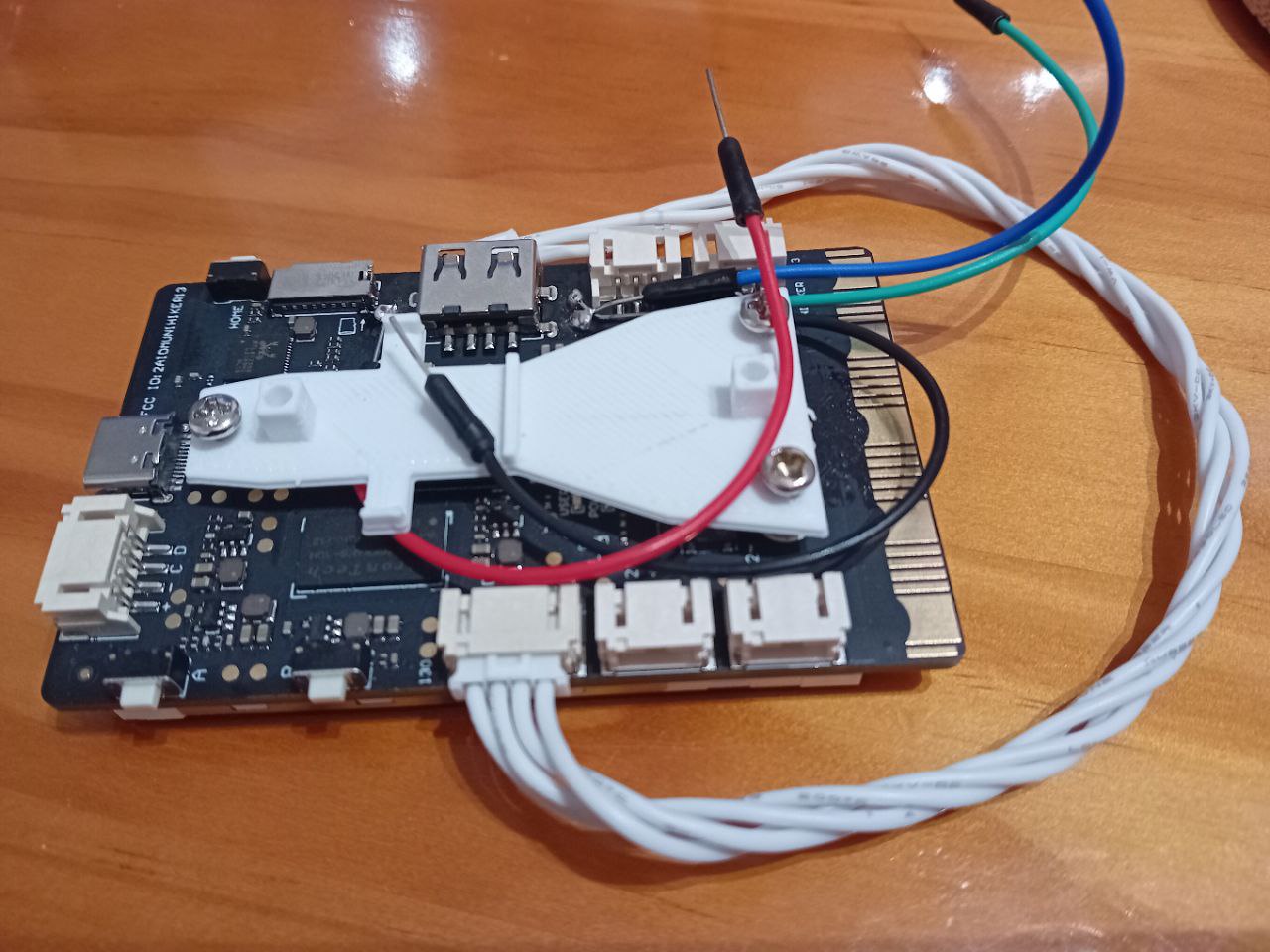
https://mindplus.cc/download-en.html - Suelda un modulo de presión y temperatura BMP-280 y conéctalo a un cable I2C que vienen con la placa. Tendrás que doblar ligeramente algunos pines para que encajen en el conector que parece un nano JST de 1mm.

- Enchufa el UNIHIKER a tu PC usando el cable USB-C y establece una conexión con Mind+ tal y como recomienda la wiki oficial:
https://www.unihiker.com/wiki/get-started#4.4.%20Programming%20on%20Mind+
Ya estás listo!
Configuración
- En Mind+, ve al Blocks editor y abre el menú Extensions.
- En la pestaña pinpong selecciona el propio módulo pinpong (que habilita la interacción con los pines de la UNIHIKER) y el módulo de extensión BMP-280, que añade la interacción con estos módulos.

- Vuelve al Blocks editor y comienza a construir tu bloque de código. Simplemente navega por el menú lateral izquierdo y arrastra todo lo que necesitas debajo del bloque Python program start:
- pinpong - initialize board.
- bmp280 - initialize I2C address 0x76 para inicializar el módulo.
- control - bloque forever (introduce un bucle while True).
- unihiker - añade objetos a la pantalla. Primero añado un objeto filled rectangle para limpiar texto anterior, luego añado el objeto text. Especifica coordenadas X,Y donde se mostrará cada objeto, al igual que su color.
- bmp280 - objeto read temperature. Arrástralo dentro del campo de texto del objeto text.
- python - (opcional) añade un objeto print para mostrar los datos en terminal. Yo he incluido todas las otras propiedades que devuelve el sensor.
- control - añade un objeto wait para detener el programa durante 1 segundo antes del siguiente bucle.
Debería quedar todo así (haz click para ampliar)

Ejecución
Y ya está todo el programa montado, sin programar! Pulsa RUN en la parte superior de Mind+ y observa cómo se carga y se muestra por la pantalla de la UNIHIKER. Toca el sensor ligeramente con el dedo para ver cómo varían los valores con el incremento de temperatura.

Han sido sólo 2 minutos no?