PAL es una versión simplificada de mi asistente del hogar en python, que se ejecuta en una placa UNIHIKER de DFRobot, y que lanzo en código abierto gratuito.
Esta es solo una pequeña demostración de la simplicidad de la ejecución de comandos con reconocimiento de voz en python, y con suerte servirá de guía para tu propio asistente.
Version actual: v0.2.0 (actualizado septiembre 2024)
Características
La versión actual incluye lo siguiente:
- Reconocimiento de voz: usando la librería de código abierto SpeechRecognition, se obtiene una lista con las cadenas de texto reconocidas.
- Pronóstico del tiempo: usando la API de datos de World Meteorological Organization, devuelve el tiempo de hoy y el pronóstico de los próximos 3 días. Incluye los iconos de la WMO.
- Temperatura local: reads local BMP-280 temperature sensor to provide a room temperature indicator.
- Comandos HTTP para IoT: flujo de trabajo básico para controlar dispositivos inteligentes de IoT mediante comandos HTTP. Actualmente ENCIENDE y APAGA un interruptor inteligente Shelly2.5.
- Modo ahorro de energía: controla el brillo para reducir el consumo de energía.
- Gestor de conexión: periódicamente comprueba el wifi y llama a internet para restaurar la conexión cuando se pierda.
- Muestra de voces de PAL: voz clonada de PAL de "Los Mitchells contra las Máquinas" usando el modelo de IA de voz CoquiAI-TTS v2.
- Botones UNIHIKER: botón A despliega un simple menú (está pensado para desarrollar un menú más complejo en el futuro).
- Controles táctiles: restaura el brillo (centro), cambia de programa (izquierda) y cierra el programa (derecha) pulsando en distintas zonas de la pantalla.
Instalación
- Instala dependencias:
pip install SpeechRecognition pyyaml - Descarga el repositorio de github:
https://github.com/TheRoam/UNIHIKER-PAL - Sube los archivos y carpetas a la UNIHIKER en /root/upload/PAL/
- Configura en
PAL_config.yamllas credenciales WIFI, dispositivos IoT, etc. - Lanza el script de python
python /root/upload/PAL/PAL_020.pydesde la terminal de Mind+ o desde la interfaz táctil de UNIHIKER.
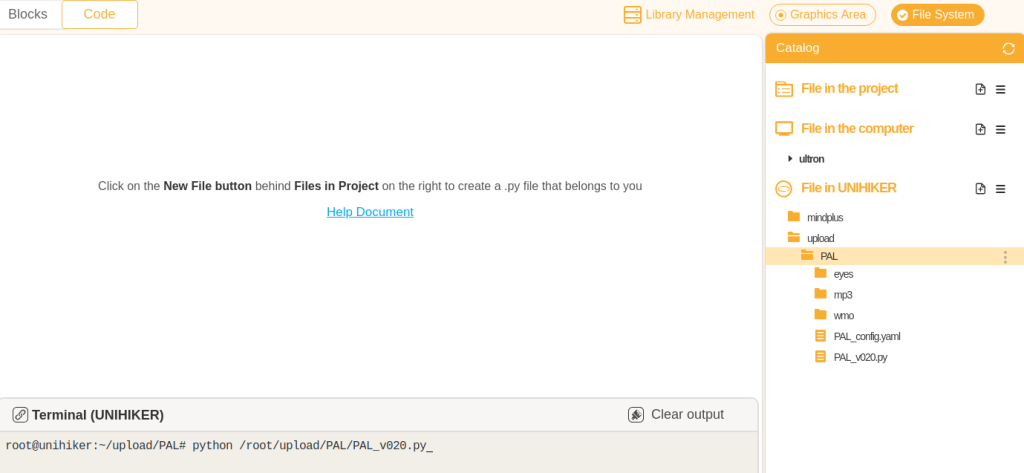
Si habilitas Auto boot en el menú de Service Toggle, el script se ejecutará automáticamente cada vez que se reinicie la UNIHIKER
https://www.unihiker.com/wiki/faq#Error:%20python3:%20can't%20open%20file…
Configuración
Version 0.2.0 includes configuration using a yaml file that is read when the program starts.
CREDENTIALS:
ssid: "WIFI_SSID"
pwd: "WIFI_PASSWORD"
DEVICES:
light1:
brand: "Shelly25"
ip: "192.168.1.44"
channel: 0
light2:
brand: "Shelly25"
ip: "192.168.1.44"
channel: 1
light3:
brand: "Shelly1"
ip: "192.168.1.42"
channel: 0
PAL:
power_save_mode: 0
temperature_sensor: 0
wmo_city_id: "195"Localización
La variable "CityID" se usa para proporcionar un pronóstico del tiempo de WMO más cercano a tu localización.
Elige una de las localizaciones disponibles en su listado oficial:
https://worldweather.wmo.int/en/json/full_city_list.txt
Dispositivos IoT
En este momento, PAL v0.2.0 solo incluye compatibilidad con Shelly2.5 para fines demostrativos.
Usa las variables lampBrand, lampChannel y lampIP para ajustar tu configuración de Shelly2.5.
Esto es solo un ejemplo para mostrar cómo se pueden configurar distintos dispositivos. Estas variables se deberían usar para cambiar las peculiaridades de los comandos HTTP que se envían a cada dispositivo IoT.
Se añadirán más dispositivos en futuras actualizaciones, como Shelly1, ShellyDimmer, Sonoff D1, etc.
Modo ahorro de energía
El ahorro de energía disminuye el brillo del dispositivo para reducir el consumo de energía de la UNIHIKER. Esto se hace usando el comando del sistema "brightness".
Cambia la variable "ps_mode" para habilitar ("1") o deshabilitar ("0") el modo ahorro de energía.
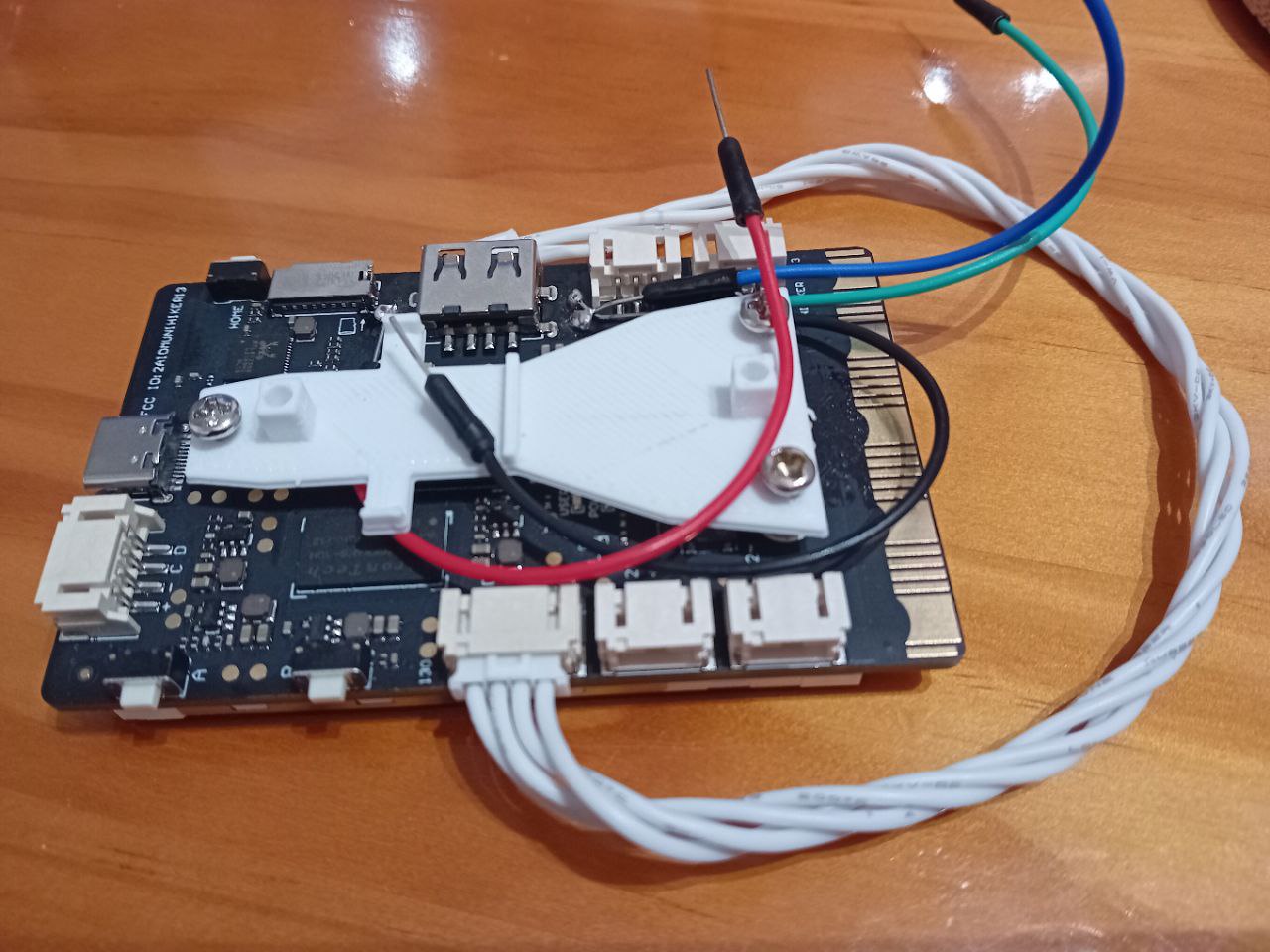
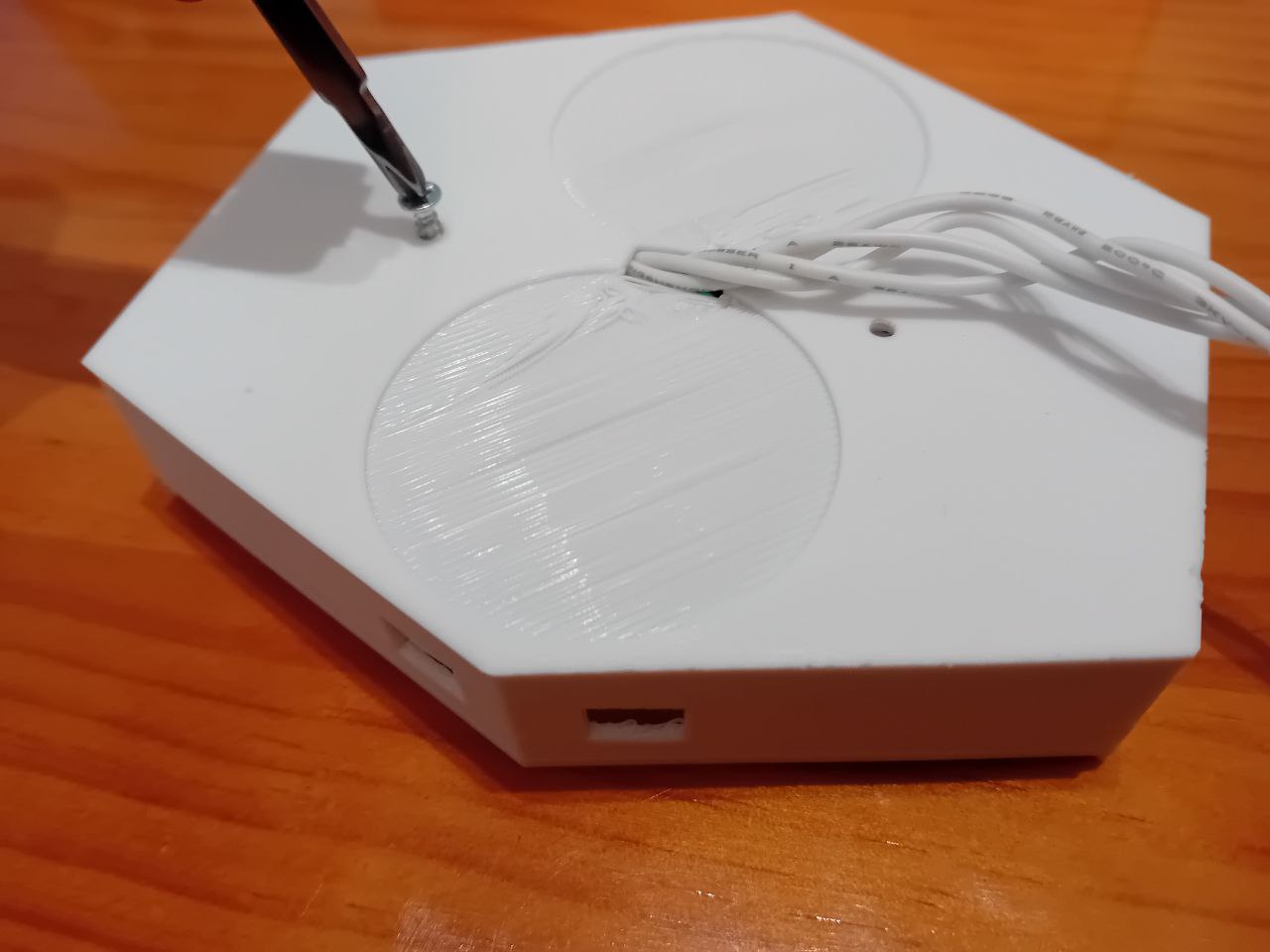
Temperatura de habitación
Cambia la variable "room_temp" para habilitar ("1") o deshabilitar ("0") el módulo de lectura de sensor de temperatura. Esto requiere un sensor BMP-280 instalado mediante el conector I2C.
Comprueba este otro post para los detalles de la instalación del sensor:
https://theroamingworkshop.cloud/b/en/2490/
Otras configuraciones desde el código fuente:
Tema
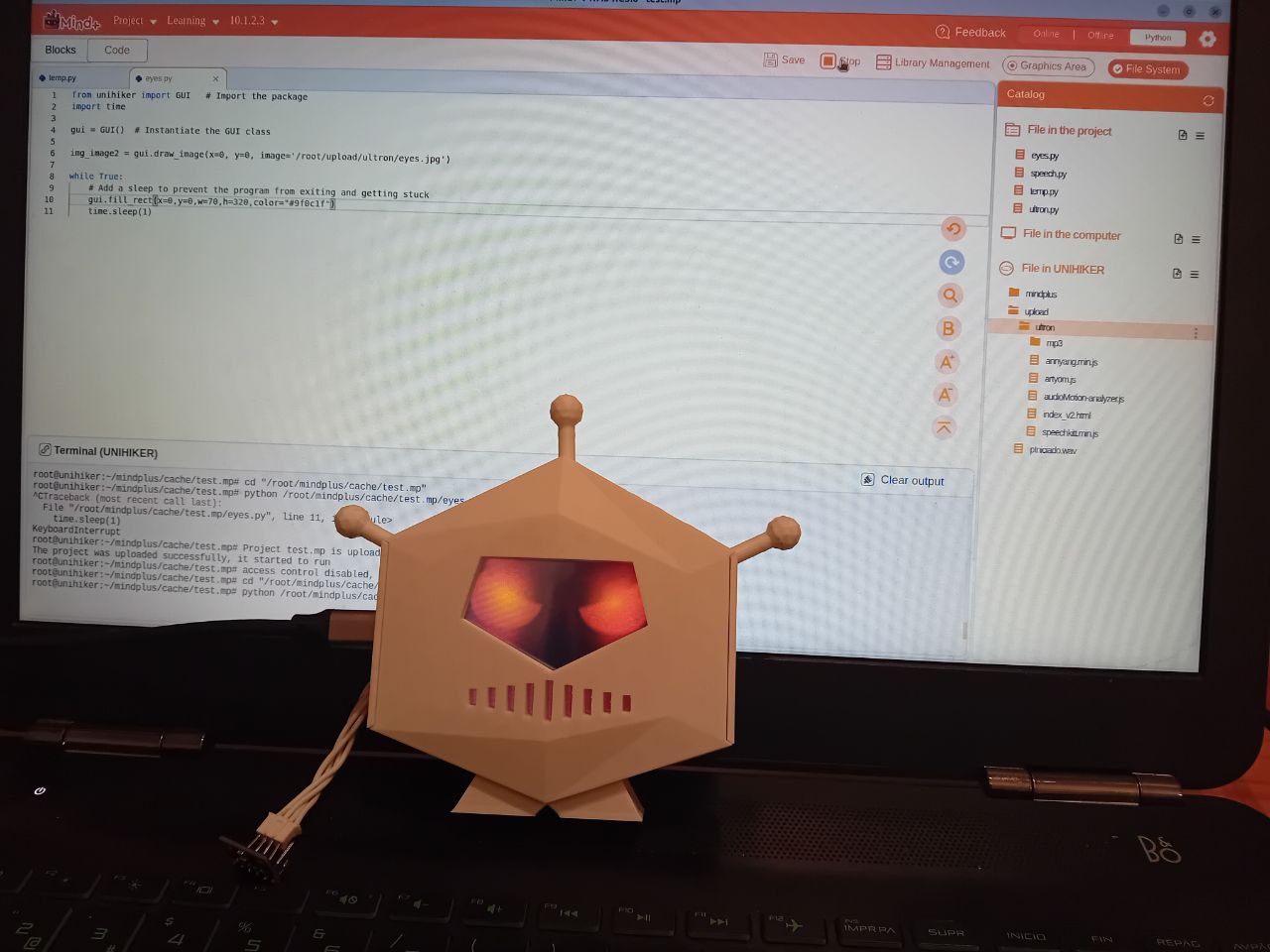
Se habilita la personalización de la imagen de fondo que representa los ojos de PAL.
Usa las variables "eyesA" y "eyesB" para especificar uno de los siguientes valores y cambia la expresión del PAL:
- "happy"
- "angry"
- "surprised"
- "sad"




"eyesA" se usa como fondo por defecto y "eyesB" se usa como transición cuando el reconocimiento de voz se activa y PAL habla.
El valor por defecto de "eyesA" es "surprised" y cambiará a "happy" cuando se reconoce un comando.
Comandos personalizados
Añadir tus propios comandos a PAL es simple usando la función "comandos".
Cada audio reconocido por SpeechRecognition se envía como una cadena a la función "comandos", que filtra y lanza uno u otro comando coincidente con la orden.
Solo define todas las posibles cadenas que pueden ser reconozidas para lanzar tu comando (a veces SpeechRecognition devuelve transcripciones erróneas o imprecisas).
Finalmente, define el comando que se lanza cuando la cadena coincide.
def comandos(msg):
# LAMP ON
if any(keyword in msg for keyword in ["turn on the lamp", "turn the lights on","turn the light on", "turn on the light", "turn on the lights"]):
turnLAMP("on")
os.system("aplay '/root/upload/PAL/mp3/Turn_ON_lights.wav'")Palabra clave para la activación
Puedes personalizar las palabras clave o cadenas que activan las funciones de comandos. Si cualquiera de las palabras clave en la lista es reconocida, toda la frase se envía a la función "comandos" para buscar un comando coincidente y ejecutarlo.
En caso de PAL v0.2, estas son las palabras clave que lo activan (el 90% de las veces es Paypal...):
activate=[
"hey pal",
"hey PAL",
"pal",
"pall",
"Pall",
"hey Pall",
"Paul",
"hey Paul",
"pol",
"Pol",
"hey Pol",
"poll",
"pause",
"paypal",
"PayPal",
"hey paypal",
"hey PayPal"
]Puedes cambiar esto a cualquier otra frase o nombre para activar a PAL cuando la llames de esa manera.
Voz de PAL
Usa la muestra de audio "PAL_full" abajo (también en el repositorio de github en /mp3) como audio de referencia para la clonación de voz de CoquiAI-TTS v2 y genera tus propias voces:
https://huggingface.co/spaces/coqui/xtts
TIP!
Comprueba este otro post sobre clonación de voz con CoquiAI-XTTS:
https://theroamingworkshop.cloud/b/2429
Demo
A continuación hay algunos ejemplos de consultas y respuestas de PAL:
Futuros lanzamientos (To-Do list)
Iré desarrollando estas características en mi asistente personal, e iré actualizando la versión de código abierto de vez en cuando. Ponte en contacto via github si tienes especial interés en alguna de ellas:
- Menú avanzado: añadir configuración y comandos manuales.
- Dispositivos IoT: incluir todos los comandos HTTP de Shelly y Sonoff.
- Consultar la hora: requiere clonar la voz de todas las combinaciones de números...
- Consulta de Wikipedia/internet: requiere generar voz en tiempo real...
- Mejoradas animaciones / temas.
Comentarios, problemas o mejoras, me encantará recibirlos en github o Twitter!